
Overview
An experiment connecting a physical glove controller to a Google Cardboard VR headset. The glove reads finger contact combinations via Arduino and transmits the data wirelessly to a Unity application on the phone. In VR, the player sees colored spheres approaching and must respond with the correct hand gesture – each of ten colors mapped to a different finger combination.
Note: downloading the project allows you to explore the visuals, but playing the game requires physical setup (a Google Cardboard headset and a custom glove with Arduino).
Tools: Arduino UNO, Unity, Python, Google Cardboard, WiFi bridge
Context: Independent experiment, 2026
An experiment connecting a physical glove controller to a Google Cardboard VR headset. The glove reads finger contact combinations via Arduino and transmits the data wirelessly to a Unity application on the phone. In VR, the player sees colored spheres approaching and must respond with the correct hand gesture – each of ten colors mapped to a different finger combination.
Note: downloading the project allows you to explore the visuals, but playing the game requires physical setup (a Google Cardboard headset and a custom glove with Arduino).
Tools: Arduino UNO, Unity, Python, Google Cardboard, WiFi bridge
Context: Independent experiment, 2026
Concept
Concept VR Hand is a small-scale experiment in alternative input – an exploration of what it takes to connect physical electronics to a VR environment. The interest behind it is practical: conventional VR controllers are a given, but the space of possible interactions is much wider. Building a glove from textile, foil contacts, and an Arduino is a direct way into that space – a first step toward understanding how alternative VR controllers can be designed and built.
The chain between gesture and response is simple: finger contact becomes electrical signal, signal becomes serial data, data crosses WiFi as UDP packets, packets become Unity input, input becomes visual event. The game mechanic – memorising ten color-gesture pairs while dodging incoming spheres – is minimal by design. The challenge for me was the interface itself, not the game around it.
The chain between gesture and response is simple: finger contact becomes electrical signal, signal becomes serial data, data crosses WiFi as UDP packets, packets become Unity input, input becomes visual event. The game mechanic – memorising ten color-gesture pairs while dodging incoming spheres – is minimal by design. The challenge for me was the interface itself, not the game around it.
Death is managed by simple hp bar. When HP is 0, players sees final score and can restart by destioying the relating ball the same way it is done during the game.
Attack made by combinations on glove, represented by numbers T000 P000 on the screen. T – Thumb, P – Palm, and 0000 - fingers from index to pinky.
For example, index + tumb and ring+ pinky + palm would be T:1000 P:0011
For example, index + tumb and ring+ pinky + palm would be T:1000 P:0011
Process
The technical chain required an unexpected workaround: without a WiFi module for the Arduino, and with direct Arduino-to-phone USB connection requiring a fight with Android permissions, a laptop was introduced as an intermediary. Computer's sole function in the system is to act as a WiFi bridge – it connects to the phone's mobile hotspot and forwards serial data from the Arduino as UDP packets, which the Unity application on the phone reads. During demonstration, the laptop sits in the player's laptop bag.

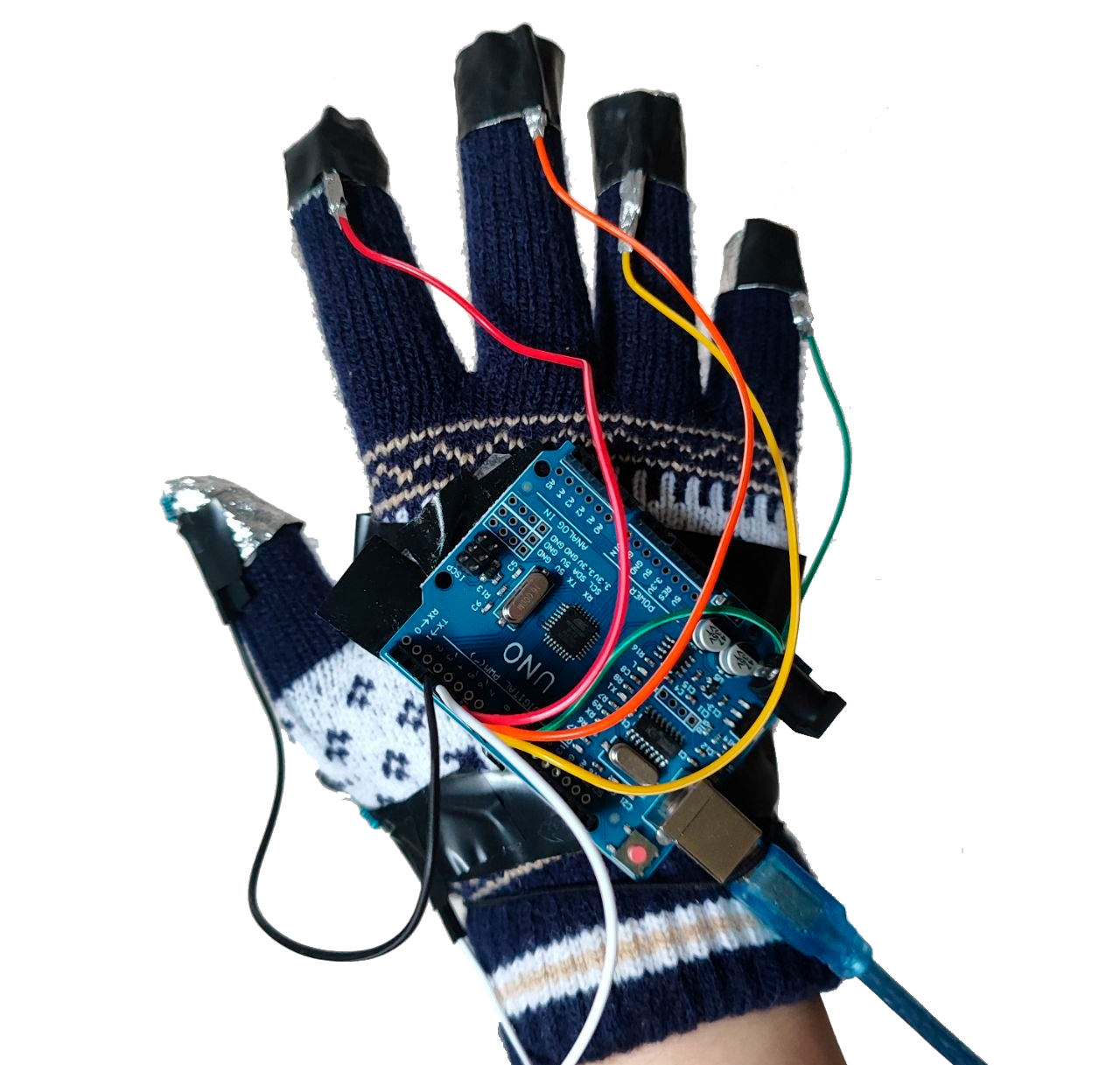
The glove itself was built from proxy materials: a textile glove, aluminium foil as a flexible conductor, and electrical tape. This kind of assembly does not function as a proper device, but proved reliable enough for continuous testing. Although over time the contacts wore out and were read less clearly.
The rest of the build involved setting up the Arduino to read finger contact combinations, making a Python bridge script to handle the serial-to-UDP conversion, and configuring Unity to receive and parse the incoming data. Due to persistent issues with the Google Cardboard SDK, the stereoscopic split-screen and accelerometer-based head tracking were implemented manually in Unity (with AI code assistance) – a faster solution than continuing to debug the SDK integration for a short-form experinment.
The rest of the build involved setting up the Arduino to read finger contact combinations, making a Python bridge script to handle the serial-to-UDP conversion, and configuring Unity to receive and parse the incoming data. Due to persistent issues with the Google Cardboard SDK, the stereoscopic split-screen and accelerometer-based head tracking were implemented manually in Unity (with AI code assistance) – a faster solution than continuing to debug the SDK integration for a short-form experinment.


